Inspirée des cours d’agilité canine, une équipe de scientifiques de Google DeepMind a développé un cours d’agilité de robot appelé Barkour pour tester les capacités des robots à quatre pattes.
Depuis les années 1970, les chiens ont été entraînés à sauter avec agilité à travers des cerceaux, à escalader des pentes et à se faufiler entre des poteaux afin de démontrer leur agilité. Pour remporter des rubans à la maison lors de ces compétitions, les chiens doivent avoir non seulement de la vitesse, mais aussi des réflexes aiguisés et une attention aux détails. Ces cours ont également établi une référence pour la façon dont l’agilité doit être mesurée à travers les races, ce qui est quelque chose qui Scène Atil—un scientifique de Google DeepMind à Denver—déclare qu’il manque dans le monde des robots à quatre pattes.
Malgré de grands développements au cours de la dernière décennie, y compris des robots comme Le mini guépard du MIT et Place de Boston Dynamics qui ont montré à quel point le mouvement des robots ressemblant à des animaux peut être, un manque de tâches standardisées pour ces types de robots a rendu difficile la comparaison de leurs progrès, explique Iscen.
La course d’obstacles quadrupède fournit une nouvelle référence en matière de robotsYoutube
“Contrairement aux références précédentes développées pour les robots à pattes, Barkour contient un ensemble diversifié d’obstacles qui nécessitent une combinaison de différents types de comportements tels que la marche, l’escalade et le saut précis”, explique Iscen. “De plus, notre métrique basée sur le temps pour récompenser un comportement plus rapide encourage les chercheurs à repousser les limites de la vitesse tout en maintenant les exigences de précision et de diversité des mouvements.”
Pour leur parcours d’agilité de taille réduite – le parcours de Barkour faisait 25 mètres carrés au lieu de jusqu’à 743 mètres carrés utilisé pour les parcours traditionnels – Iscen et ses collègues ont choisi quatre obstacles parmi les parcours traditionnels d’agilité canine : une table de pause, des poteaux de tissage, l’escalade d’un cadre en A et un saut.
Le parcours de référence robotique quadrupède de Barkour utilise quatre obstacles des parcours traditionnels d’agilité canine et normalise un ensemble de mesures de performance autour des horaires des sujets sur le parcours. Google
“Nous avons choisi ces obstacles pour mettre plusieurs axes d’agilité, y compris la vitesse, l’accélération et l’équilibre”, a-t-il déclaré. “Il est également possible de personnaliser davantage le parcours en l’étendant pour contenir d’autres types d’obstacles dans une zone plus large.”
Comme dans les compétitions d’agilité canine, les robots qui entrent dans ce parcours se voient déduire des points pour avoir échoué ou manqué un obstacle, ainsi que pour avoir dépassé la limite de temps du parcours d’environ 11 secondes. Pour voir à quel point leur cours était difficile, l’équipe DeepMind a développé deux approches d’apprentissage différentes pour le cours : une approche spécialisée qui s’est entraînée sur chaque type de compétence nécessaire pour le cours – par exemple, sauter ou escalader une pente – et une approche généraliste qui s’est entraînée par l’étude de simulations réalisées selon l’approche spécialisée.
Après avoir formé des robots à quatre pattes dans ces deux styles différents, l’équipe les a relâchés sur le parcours et a constaté que les robots formés avec l’approche spécialisée devançaient légèrement ceux formés avec l’approche généralisée. Les spécialistes ont terminé le parcours en 25 secondes environ, tandis que les généralistes ont pris près de 27 secondes. Cependant, les robots entraînés avec les deux approches ont non seulement dépassé la limite de temps du parcours, mais ont également été dépassés par deux petits chiens – un mélange Poméranie / Chihuahua et un Teckel – qui ont terminé le parcours en moins de 10 secondes.
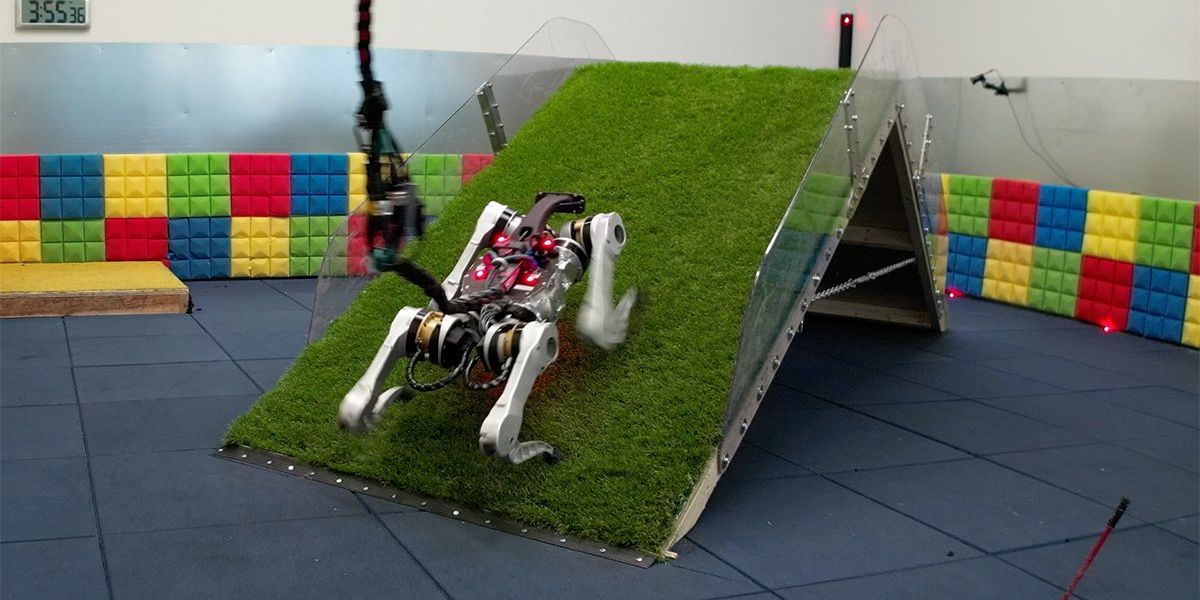
 Ici, un vrai chien [left] et un robot quadrupède [right] monter puis commencer leur descente sur le défi A-frame du parcours de Barkour. Google
Ici, un vrai chien [left] et un robot quadrupède [right] monter puis commencer leur descente sur le défi A-frame du parcours de Barkour. Google
“Il y a encore un grand écart d’agilité entre les robots et leurs homologues animaux, comme le démontre ce benchmark”, écrit l’équipe dans sa conclusion.
Bien que les performances des robots aient pu être inférieures aux attentes, l’équipe écrit que c’est en fait un point positif car cela signifie qu’il y a encore de la place pour la croissance et l’amélioration. À l’avenir, l’Iscen espère que la reproductibilité aisée du cours de Barkour en fera une référence attractive à utiliser dans l’ensemble du domaine.
« Nous avons pris en compte de manière proactive la reproductibilité de la référence et maintenu le coût des matériaux et l’empreinte au sol à un faible niveau. Nous serions ravis de voir les configurations de Barkour apparaître dans d’autres laboratoires. »
—Atil Iscen, Google DeepMind
« Nous avons pris en compte de manière proactive la reproductibilité de la référence et maintenu le coût des matériaux et l’encombrement à un faible niveau », déclare Iscen. “Nous aimerions voir apparaître des configurations de Barkour dans d’autres laboratoires et nous serions heureux de partager nos leçons apprises sur sa construction, si d’autres équipes de recherche intéressées par le travail peuvent nous contacter. Nous aimerions voir d’autres laboratoires adopter cette référence afin que toute la communauté puisse s’attaquer ensemble à ce problème difficile.
Quant à l’équipe DeepMind, l’Iscen dit qu’elle est également intéressée à explorer un autre aspect des cours d’agilité canine dans leurs futurs travaux : le rôle des partenaires humains.
« À première vue, les (vraies) compétitions d’agilité canine ne semblent concerner que la performance du chien. Cependant, beaucoup vient aux moments fugaces de communication entre le chien et son maître », explique-t-il. “Dans ce contexte, nous sommes impatients d’explorer les interactions homme-robot, par exemple comment un manipulateur peut-il travailler avec un robot à pattes pour le guider rapidement à travers un nouveau parcours d’obstacles.”
Un article décrivant le cours Barkour de DeepMind a été publié sur le serveur de prépublication arXiv en mai.
À partir des articles de votre site
Articles connexes sur le Web











