
En février 2019, nous avons écrit sur une sorte de robot humanoïde (?) En cours de développement à Caltech, appelé Leonardo. LEO combine des jambes bipèdes légères avec des propulseurs montés sur le torse suffisamment puissants pour soulever l’ensemble du robot du sol, ce qui peut facilement s’occuper de l’équilibrage dynamique au sol tout en permettant des manœuvres aériennes fluides.
Dans un article publié aujourd’hui dans Robotique scientifique, les chercheurs de Caltech nous expliquent ce qu’ils font avec LEO depuis plusieurs années, et il peut désormais faire du skateboard, de la slackline et faire des sauts aériens délicats avec des atterrissages exceptionnellement élégants.
Ces talons ! Cela ressemble à une véritable opportunité de parrainage, n’est-ce pas ?
La version de LEO que vous voyez ici est très différente de la version que nous avons rencontrée pour la première fois il y a deux ans. Plus important encore, alors que “Leonardo” signifiait “LEg ON Aerial Robotic DrOne”, il signifie désormais “LEgs ONboARD drOne”, qui est peut-être le premier re-backronym même modérément réussi que j’ai jamais vu. Sinon, le robot a été complètement repensé, la version que vous voyez ici ne partageant aucune pièce matérielle ou logicielle avec la version 2019. On nous dit que l’ancien robot, et je cite les chercheurs ici, « n’a malheureusement jamais fonctionné », en ce sens qu’il était beaucoup plus limité que le nouveau – l’ancien design était prometteur, mais il ne pouvait pas vraiment marcher et les propulseurs n’étaient utiles que pour l’augmentation des sauts par opposition au vol soutenu.
Pour permettre au nouveau LEO de voler, il a maintenant des jambes beaucoup plus légères entraînées par des servomoteurs légers. Les propulseurs sont passés de deux hélices coaxiales à quatre hélices inclinées, permettant un contrôle d’attitude dans toutes les directions. Et tout est désormais intégré, y compris les ordinateurs, les batteries et une nouvelle pile logicielle. J’aime particulièrement la façon dont LEO atterrit dans une démarche de marche si doucement et avec élégance. Le professeur Soon-Jo Chung du laboratoire de robotique et de contrôle aérospatial de Caltech explique comment ils l’ont fait :
Les créatures qui ont plus de deux modes de locomotion doivent apprendre et maîtriser comment basculer correctement entre eux. Les oiseaux, par exemple, subissent un comportement complexe mais intrigant à l’interface de transition de leurs deux modes de locomotion de vol et de marche. De même, le robot Leonardo utilise le contrôle synchronisé des propulseurs à hélice distribués et des articulations des jambes pour réaliser des transitions en douceur entre ses modes de vol et de marche. En particulier, le robot LEO suit une trajectoire de vol fluide jusqu’au point d’atterrissage avant l’atterrissage. La vitesse d’atterrissage avant est ensuite adaptée à la vitesse de marche choisie, et la phase de marche est déclenchée lorsqu’un pied touche le sol. Après l’atterrissage, le robot continue de marcher en suivant sa trajectoire de marche. Une machine d’état est exécutée à bord du LEO pour permettre ces transitions en douceur, qui sont détectées à l’aide de capteurs de contact intégrés dans le pied.

C’est très cool de voir comment Leo résout parfaitement certains des problèmes les plus difficiles avec la robotique bipède, y compris l’équilibrage dynamique et la traversée de grands changements de hauteur. Et Lion peut également faire des choses qu’aucun bipède (ou humain) ne peut faire, comme voler sur de courtes distances. En tant qu’hybride multimodal d’un robot bipède et d’un drone, cependant, il est important de noter que la conception de Leo comprend également des compromis importants. Le robot doit être très léger pour pouvoir voler, ce qui limite son efficacité en tant que bipède sans utiliser ses propulseurs pour l’assistance. Et parce qu’une grande partie de son équilibrage nécessite une entrée active des propulseurs, il est très inefficace par rapport aux drones et aux autres robots bipèdes.
Lorsqu’il marche au sol, LEO (qui pèse 2,5 kg et mesure 75 cm) aspire 544 watts, dont 445 watts pour les hélices et 99 watts pour l’électronique et les jambes. En vol, la consommation d’énergie de LEO double presque, mais c’est évidemment beaucoup plus rapide – le robot a un coût de transport (une mesure de l’efficacité de l’auto-mouvement) de 108 en marchant à une vitesse de 20 cm/s, tombant à 15,5 en vol à 3 m/s. Comparez cela au coût de transport pour un humain moyen, qui est bien inférieur à 1, ou un robot quadrupède typique, qui se situe dans les faibles chiffres. L’humanoïde le plus efficace que nous ayons jamais vu, le DURUS de SRI, a un coût de transport d’environ 1, alors que la rumeur veut que le coût de transport pour un robot comme Atlas soit plus proche de 20.
À long terme, cette faible efficacité pourrait être un problème pour LEO, puisque sa durée de vie de la batterie n’est bonne que pour environ 100 secondes de vol ou 3,5 minutes de marche. Mais, explique Soon-Jo Chung, l’efficacité n’a pas encore été une priorité, et il y a plus qui peut potentiellement être fait pour améliorer les performances de LEO, bien que toujours avec quelques compromis :
L’extrême capacité d’équilibrage de LEO se fait au détriment des hélices fonctionnant en continu, ce qui entraîne une consommation d’énergie plus élevée que les robots au sol basés sur les jambes. Cependant, cette stabilisation avec des hélices a permis l’utilisation de servomoteurs de jambe de faible puissance et de jambes légères et flexibles, ce qui était un choix de conception pour minimiser le poids total du LEO afin d’améliorer ses performances de vol.
Il existe des moyens possibles d’améliorer l’efficacité énergétique en faisant différents compromis de conception. Par exemple, LEO pourrait marcher avec le support réduit des hélices en adoptant des pieds finis pour une meilleure stabilité ou une puissance plus élevée [leg] moteurs avec contrôle de couple pour l’actionnement des articulations qui permettraient un suivi de la position du pied suffisamment rapide et précis pour stabiliser la démarche de marche. Dans un tel cas, les hélices peuvent avoir besoin de s’allumer uniquement lorsque les jambes ne parviennent pas à maintenir la stabilité au sol sans avoir à fonctionner en continu. Ces solutions entraîneraient une augmentation de poids et conduiraient à une consommation d’énergie plus élevée lors des manœuvres de vol, mais elles diminueraient la consommation d’énergie lors de la marche. Dans le cas de LEO, nous avons cherché à atteindre des capacités de locomotion aérienne et terrestre équilibrées, et nous avons opté pour des jambes légères. Parvenir à une marche efficace avec des jambes légères similaires à celles de LEO est toujours un défi ouvert dans le domaine des robots bipèdes, et il reste à étudier dans de futurs travaux.
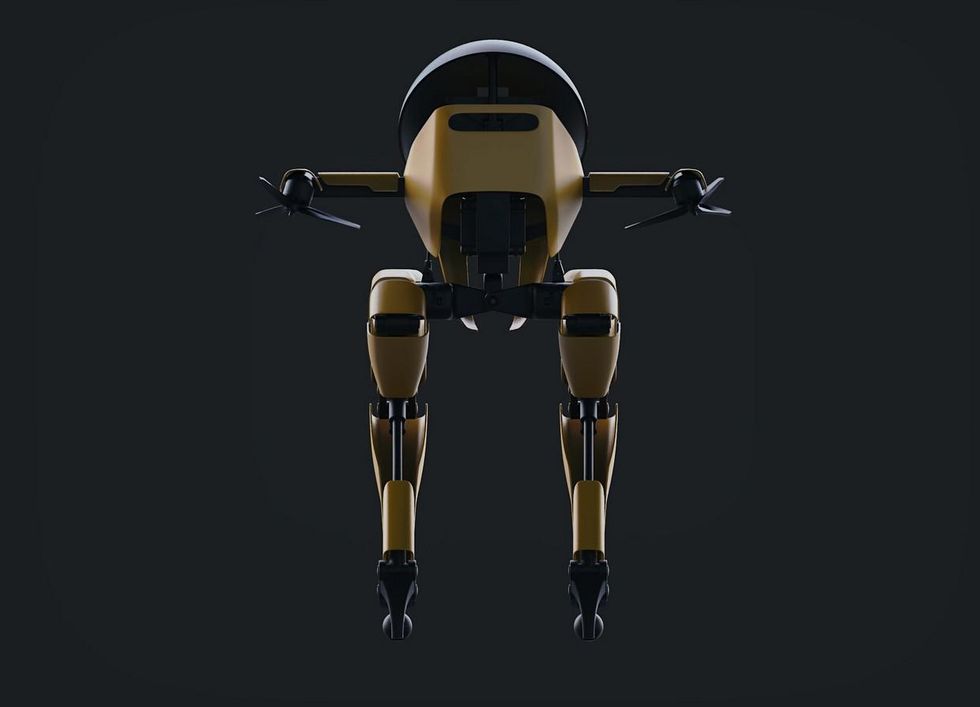
Un rendu d’une future version de LEO avec des skins jaunes fantaisie
À ce stade de son développement, les chercheurs de Caltech se sont principalement concentrés sur les systèmes de mobilité de LEO, mais ils espèrent que LEO fera des choses utiles dans le monde, ce qui signifie presque certainement donner au robot une autonomie et des capacités de manipulation. Pour le moment, LEO n’est pas particulièrement autonome, dans le sens où il suit des chemins prédéfinis et ne décide pas seul s’il doit marcher ou voler pour franchir un obstacle donné. Mais les chercheurs travaillent déjà sur les moyens par lesquels LEO peut prendre ces décisions de manière autonome grâce à la vision et à l’apprentissage automatique.
En ce qui concerne la manipulation, Chung nous dit qu'”une nouvelle version de LEO pourrait être associée à des manipulateurs légers dotés d’une conception de liaison similaire à celle de ses jambes et de ses servomoteurs pour élargir la gamme de tâches qu’il peut effectuer”, dans le but de “permettre un large gamme de missions robotiques difficiles à accomplir en utilisant uniquement des robots terrestres ou aériens. »
Les applications les plus adaptées pour LEO seraient peut-être celles qui impliquent des interactions physiques avec des structures à haute altitude, qui sont généralement dangereuses pour les travailleurs humains et pourraient utiliser des travailleurs robotisés. Par exemple, l’inspection de lignes à haute tension ou la surveillance de grands ponts pourraient être de bonnes applications pour LEO, et LEO dispose d’une caméra embarquée qui peut être utilisée à de telles fins. Dans de telles applications, les robots bipèdes conventionnels ont des difficultés à atteindre le site, et les drones multi-rotors standard ont un problème de stabilisation dans des environnements à forte perturbation. LEO utilise le contact au sol à son avantage et, par rapport à un multi-rotor standard, est plus résistant aux perturbations externes telles que le vent. Cela améliorerait la sécurité du fonctionnement du robot dans un environnement extérieur où LEO peut maintenir le contact avec une surface rigide.
Il est également tentant d’examiner la capacité de LEO à contourner plus ou moins de nombreux défis de la robotique bipède et de réfléchir à la manière dont cela pourrait être utile dans des endroits où les robots bipèdes ont tendance à se débattre. Mais il est important de se rappeler qu’en raison des compromis inhérents à sa conception multimodale, LEO sera probablement le mieux adapté pour des tâches très spécifiques qui peuvent tirer le plus directement parti de ce pour quoi il est particulièrement bon. L’inspection des lignes haute tension et des ponts est un bon début, et vous pouvez facilement imaginer d’autres tâches d’inspection qui nécessitent une stabilité combinée à une agilité verticale. Espérons que des améliorations en termes d’efficacité et d’autonomie rendront cela possible, même si je tiens toujours à ce que Chung de Caltech a promis à l’origine : « la forme ultime de démonstration pour nous sera de construire deux de ces robots Leonardo, puis de les faire jouer au tennis ou badminton.”
.